Robust Visual Tracking via Structured Multi-Task Sparse Learning
Tianzhu Zhang
Bernard Ghanem
Si Liu
Narendra Ahuja
National Lab of Pattern Recognition
Institute of Automation, Chinese Academy of Sciences
Abstract
In this paper, we formulate object tracking in
a particle filter framework as a structured multi-task sparse
learning problem, which we denote as Structured Multi-Task
Tracking (S-MTT). Since we model particles as linear combinations
of dictionary templates that are updated dynamically,
learning the representation of each particle is considered a
single task in Multi-Task Tracking (MTT). By employing
popular sparsity-inducing �p,q mixed norms (specificallyp ∈
{2,∞} and q = 1), we regularize the representation problem
to enforce joint sparsity and learn the particle representations
together. As compared to previous methods that handle
particles independently, our results demonstrate that mining
the interdependencies between particles improves tracking.
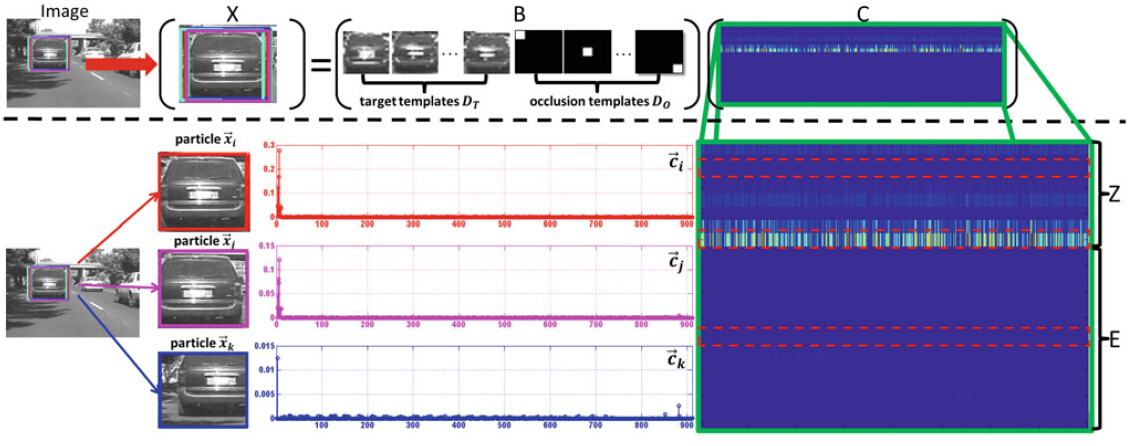 |
Figure 1 - (Color online) Schematic example of the L21 tracker. The representation C of all particles X w.r.t. dictionary B (set of target and
occlusion templates) is learned by solving Eq.(9) with p = 2 and
q = 1. Notice that the columns of C are jointly sparse, i.e. a few (but
the same) dictionary templates are used to represent all the particles
together. The particle xi is selected among all other particles as the tracking result, since xi is represented the best by object templates only. |
Video Results